Hallo,
ich möchte/muss eine SPS mit einem CANbus koppeln.
FBL ist eine eigen SPS
C3 ist ein eigener can io controller
Inputs (FBL/C3/Beckhoff)
Outputs (FBL/C3/Beckhoff)
Analoge ingangen (FBL/C3/Beckhoff)
Analoge uitgangen (FBL/C3/Beckhoff)
DC motor controller (C3)
Hokuyo interfaces (C3)
Serial channels (FBL)
Encoder channels (FBL)
Pilz m0p safety PLC
Power motor controller (Zapi)
Alle Eingänge kunnen direct über 2 CANopen busse gelsen und / oder geschrieben werden.
FLB, C3, Pilz, Beckhoff und Zapi sind als SPS-Kästen in EPLAN gezeichnet.
Die MMS (Magnetleiste), Hengstler ABS enkoder (z.B. AC58) und Sick fEld scanner sind als apparatkästen gezeichnet, es sind alles einzelne signalgeber.
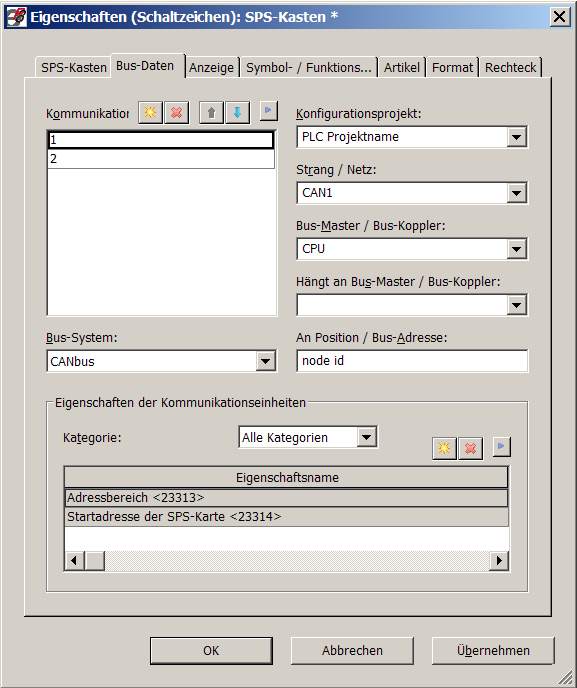
wir haben can1 und can2, 2 separate CAN busse auf unsere SPS (Haupt-SPS)
auf jedem der 2 busse werden manchmal sowohl SPS und manchmal ABS Enkoder angeschlossen, die eine unverwechselbare "node ID" haben.
diese 2 bus anmerkungen und dies node-id möchte ich bei den geräten und der SPS korrrekt eingeben und die node-id in der i/o liste wieder zom vorschein bringen, da dies für den programmierer wesentliche infos sind.
wie geht eplan mit der eingabe der CANbus eigenschaften um, welche felder muss ich benutzen um die CANbus gter"te zu konfigurieren.
ich find's ne gute frage, bin seid drei tagen damit zugange und komm nicht raus aus der nummer. liegt vielleicht daran, dass ich keinerlei ahnung von canbus habe, ausser das harley davidson das jetzt in motorräder verbaut.
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP

 Foren auf CAD.de (alle Foren)
Foren auf CAD.de (alle Foren)



 |
|