|
Autor
|
Thema: Problem Simulation with Laws (1385 mal gelesen)
|
Muckenbatscher
Mitglied
Student Maschinenbau

   Beiträge: 44
Registriert: 18.03.2013 CATIA V5 R20
Windows 7 64 Bit
Core i7
16 GB RAM
|

 erstellt am: 18. Aug. 2013 12:17
erstellt am: 18. Aug. 2013 12:17  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
Hallo, ich habe ein Problem mit meiner Simulation with Laws.
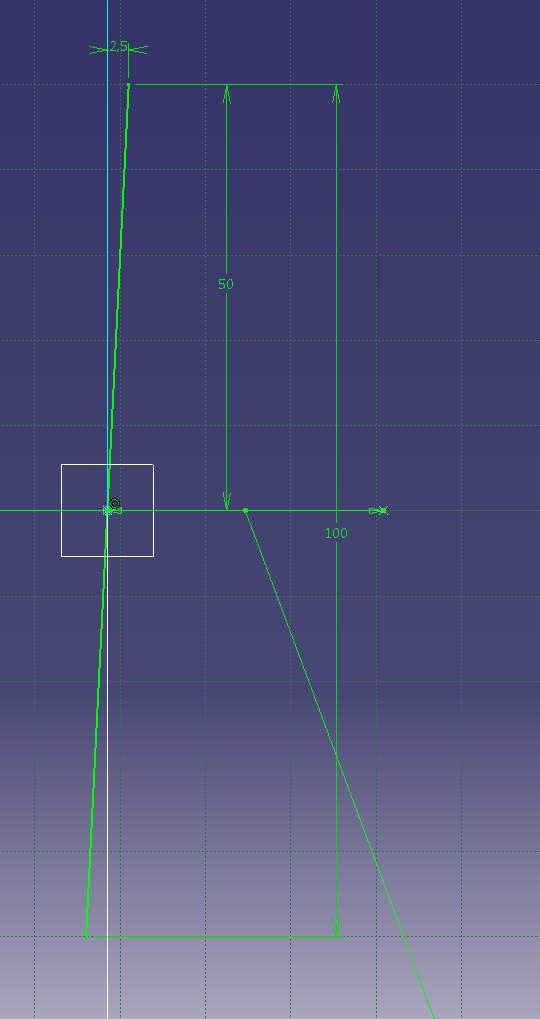
Ich habe eine Skizze gemacht, die ja für eine simulation with laws benötigt wird. Diese besteht aus einer einfachen Linie, 100mm lang, 5mm breit. Die Breite ist ja für die Zeit (also 5s) und die Länge von 100mm soll mir meinen Federweg von 100mm generieren.
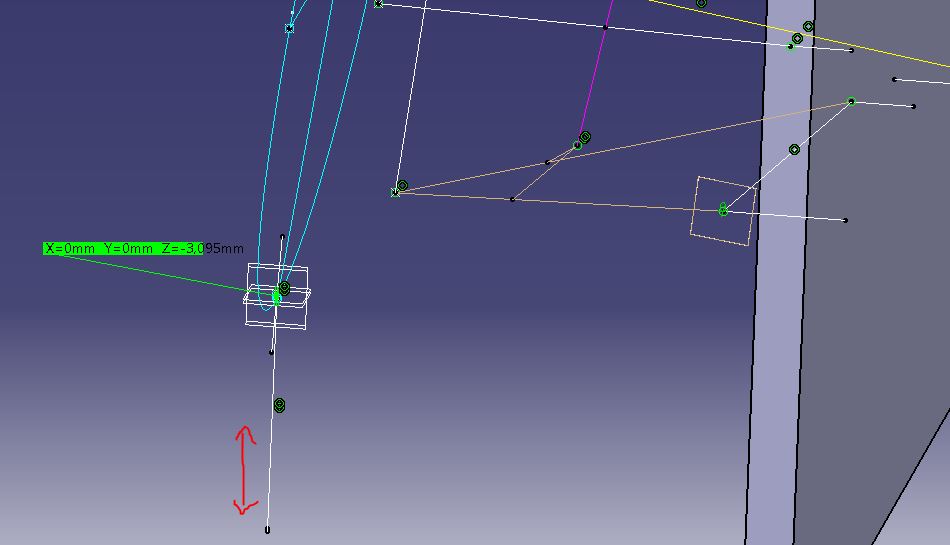
Problem: Wenn ich auf den Button "Simulation with Laws" klicke, um die Simulation zu starten, "springt" meine Kinematik plötzlich auf ein unerklärliches Maß. Im angefügten Bild seht ihr, dass die Z-Koordinate -3,095mm hat. Eigentlich sollte die 0mm sein. Hat jemand eine Idee? Vielen Dank! Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
bgrittmann
Moderator
Konstrukteur
    
Beiträge: 11780
Registriert: 30.11.2006 CATIA V5R19
|
erstellt am: 19. Aug. 2013 11:42 <-- editieren / zitieren --> Unities abgeben: Nur für Muckenbatscher 
Servus Eine Linie hat keine Breite *grins* Geht es wenn du Bewegung über eine Formel steuerst? Wie sieht die Skizze aus? Kannst du die über "Simulation mit Regel" den Mechanismus an den Start schieben? Kannst du das Modell hochladen (ggf vereinfacht)? Gruß
Bernd
------------------
Warum einfach, wenn es auch kompliziert geht. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Muckenbatscher
Mitglied
Student Maschinenbau
Beiträge: 44
Registriert: 18.03.2013 CATIA V5 R20
Windows 7 64 Bit
Core i7
16 GB RAM
|
erstellt am: 19. Aug. 2013 12:31 <-- editieren / zitieren --> Unities abgeben:
Hallo Bernd, Danke für deine Antwort.
Zitat:
Wie sieht die Skizze aus?
Die Skizze siehst du im Anhang als Bild (Linie). Zitat:
Geht es wenn du Bewegung über eine Formel steuerst?
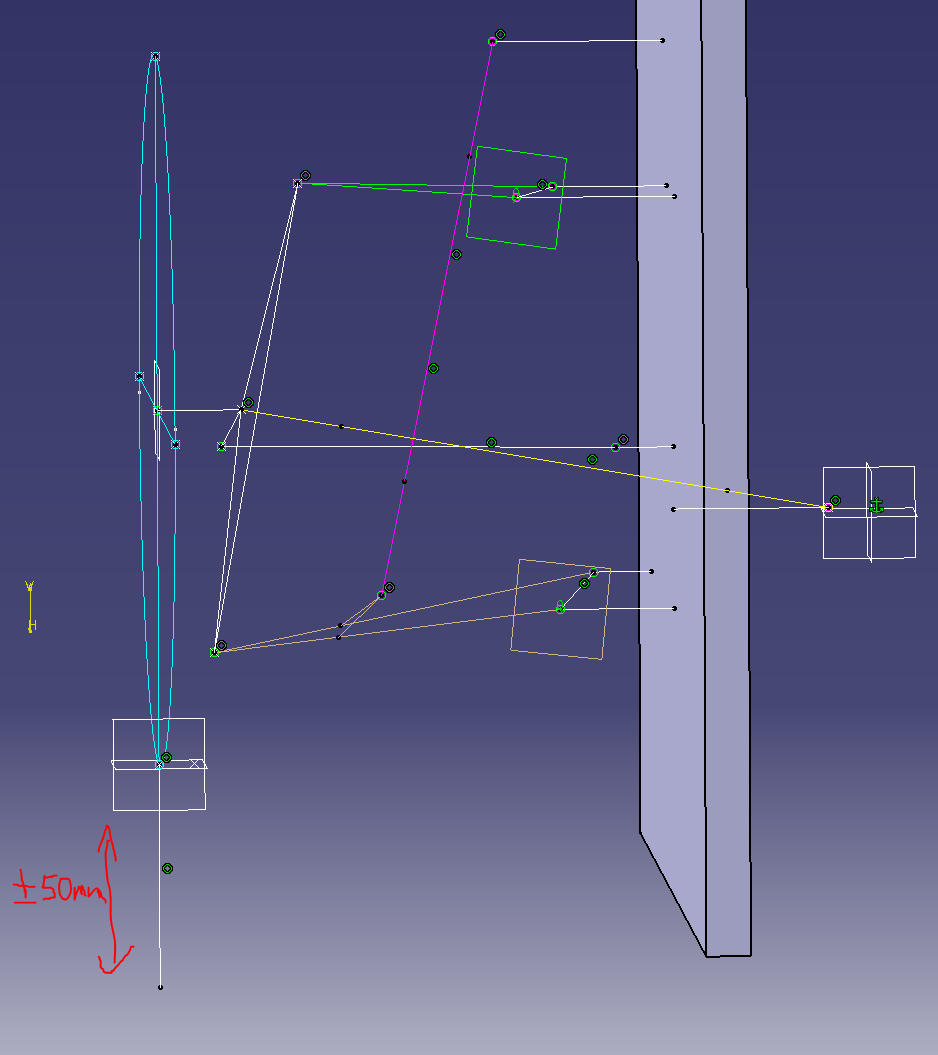
Über Formel steuern weiß ich nicht wie das geht. Ich kenne mich leider nicht damit aus. Allerdings soll meine Kinematik später per Makro gesteuert werden (wo ich auch noch keine Ahnung davon hab). Ich habe mich allerdings hier im Forum etwas informiert und da habe ich irgendwo die Info aufgenommen, dass man die Kinematik über ein Makro später nur über Laws steuern kann, nicht aber mit Commands. Korrigiere mich bitte, wenn ich da falsch liege. Den Mechanismus an den Start schieben klappt nicht. Mein Ziel ist einen Federweg von 100mm zu simulieren (siehe Anhang Federweg). Sprich von Nulllage aus gesehen +50mm einfedern und -50mm ausfedern. Wenn ich die Simulation beende, will ich dass dann die Radaufhängung wieder in Nullposition einfährt. Hochladen ist mir seitens der Firma leider nicht gestattet... Danke! ------------------
Grüße
Muckenbatscher Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
bgrittmann
Moderator
Konstrukteur
Beiträge: 11780
Registriert: 30.11.2006 CATIA V5R19
|
erstellt am: 19. Aug. 2013 13:05 <-- editieren / zitieren --> Unities abgeben: Nur für Muckenbatscher
Servus So wie du es beschreibst würde ich eine Skizze mit einer Zick-Zack-Linie erstellen (bei (0;0) starten, (2,5;50), (7,5;-50),(0;0)). Wo hat deine Skizze ihren Ursprung? In welchen Teil ist diese (könnte auch im fixierten "Gestell" sein) Gruß
Bernd
------------------
Warum einfach, wenn es auch kompliziert geht. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Muckenbatscher
Mitglied
Student Maschinenbau
Beiträge: 44
Registriert: 18.03.2013 CATIA V5 R20
Windows 7 64 Bit
Core i7
16 GB RAM
|
erstellt am: 19. Aug. 2013 13:10 <-- editieren / zitieren --> Unities abgeben:
Hallo, danke für den Tipp. Den probiere ich mal. Der Ursprung liegt momentan in dem "Stempel" wo das Rad nach oben und unten bewegt bzw "antreibt". Sprich, die Skizze ist nicht in einem fixierten Teil. Ist das erforderlich? ------------------
Grüße
Muckenbatscher Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Muckenbatscher
Mitglied
Student Maschinenbau
Beiträge: 44
Registriert: 18.03.2013 CATIA V5 R20
Windows 7 64 Bit
Core i7
16 GB RAM
|
erstellt am: 19. Aug. 2013 13:49 <-- editieren / zitieren --> Unities abgeben:
hmm also ich habe nun eine andere Skizze gemacht, die funktioniert schon in die richtige Richtung aber noch nicht vollständig....irgendwie hänge ich  . Ziel soll sein: - Beim Klicken auf den imulation Button sollte die Animation auf den voll eingefederten Zustand (+50mm) springen
- anschließend Simulation des kompletten ausfederns bis (-50mm)
- beim Schließen des Simulationsfensters soll dann die Kinematik wieder in Nullposition springen. Hast du eine Idee welche Skizze ich das machen muss? ------------------
Grüße
Muckenbatscher Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
Muckenbatscher
Mitglied
Student Maschinenbau
Beiträge: 44
Registriert: 18.03.2013 CATIA V5 R20
Windows 7 64 Bit
Core i7
16 GB RAM
|
erstellt am: 19. Aug. 2013 14:03 <-- editieren / zitieren --> Unities abgeben:
ich habe es fast. aber diesen sprung bekomme ich nicht hin. ich muss eine sehr kleine zeit nehmen. meine koordinaten sind (0;0) dann (0,01;-50) dann (4,98;+50) und dann (0,01;0) aber eigentlich hätte ich gerne (0;0) dann (0;-50) dann (5;+50) und dann (0;0) aber die 0 wird nicht akzeptiert. Problem ist, dass die 0,01 meine Messwerte über Sensoren verfälschen, wenn ich die mit aufzeichnen will.
------------------
Grüße
Muckenbatscher Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
reimund
Mitglied
Beiträge: 231
Registriert: 29.10.2004
|
erstellt am: 20. Aug. 2013 16:52 <-- editieren / zitieren --> Unities abgeben: Nur für Muckenbatscher
Hallo, die beiden Werte stellen die Zeit und die Auslenkung dar. In deinem Fall sollte es so aussehen: (0;0) (1; -50) (4;50) (5;0) Somit würde die Bewegung bei Zeit = 0, Auslenkung = 0 starten und bei Zeit = 5 und Auslenkung = 0 enden. (0;0) und danach (0;50) wird bei der Regel nicht akzeptiert, da es zu jedem x-Wert der Regel nur einen y Wert geben darf. Mit den folgenden Werten bekommst Du für alle Auslenkungen die gleichen Zeiten: (0;0) (1;-50) (2;0) (3;50) (4;0) Somit wäre die Bewegung nach 4 Zeiteinheiten beendet. Was gemau meinste Du damit, dass die 0,01 die Werte der Sensoren verfälschen? Gruß
Reimund
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |

 Foren auf CAD.de (alle Foren)
Foren auf CAD.de (alle Foren)



 |
|