|
Autor
|
Thema: DMU Kinetics Planetengetriebe (2949 mal gelesen)
|
sexyphil
Mitglied
stud
   Beiträge: 3
Registriert: 19.04.2013
|

 erstellt am: 19. Apr. 2013 13:19
erstellt am: 19. Apr. 2013 13:19  <-- editieren / zitieren --> <-- editieren / zitieren -->   Unities abgeben: Unities abgeben:          
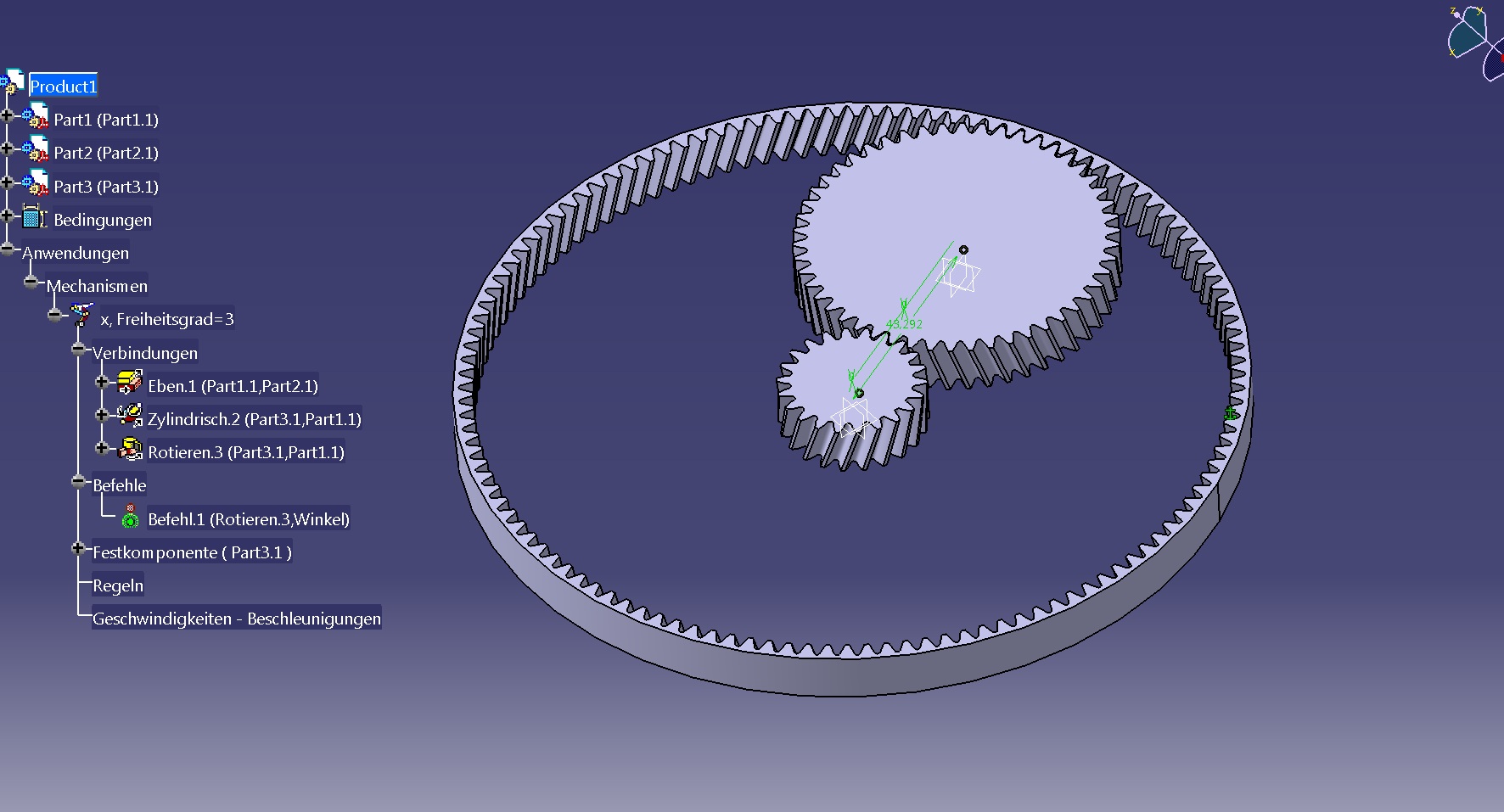
Hey, ich bin gerade im moment dabei in Catia ein Planetengetriebe zu simulieren. ich habe aus KISSsoft die alle drei Zahnräder in Catia eingelesen. nun muss ich zugeben habe ich keine ahnung wie und in welcher form man das mit kinematics simuliert. ich habe mir schon diverse internetseiten und video tutorials angesehen allerdings werde ich daraus nicht schlau. hat jemand vielleicht ein gutes tutorial oder kann mir anderweitig behilflich sein? vielen dank greetz phil Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
sexyphil
Mitglied
stud
Beiträge: 3
Registriert: 19.04.2013
|
erstellt am: 19. Apr. 2013 13:21 <-- editieren / zitieren --> Unities abgeben:
|
Templer
Mitglied
System Engineer

Beiträge: 141
Registriert: 24.01.2003 Win 7, Catia V5 R19,22,23, Enovia VPM 1.6, Enovia 3dcom 19, Enovia V6 2013x, Catia V6 2013x
|
erstellt am: 19. Apr. 2013 13:27 <-- editieren / zitieren --> Unities abgeben: Nur für sexyphil 
An deiner stelle, würde ich hier die skelett methode anwenden und mittels sub-mechanismus import die simulation in die geometrie struktur holen. Ist jetzt ein wenig schwer zu beschreiben, aber einfach ausgedrückt: erzeuge dir linien und ebenen welche die randbedigungen deiner simulation erfüllen und importiere dies dann. Vom Aufbau her, hast du 2 Products...eines mit dem skelett und eines für die Geo. Das skeltett product wird dann in das GeoProduct dazugehängt... ------------------
Non in omnes omnia conveniunt Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
bgrittmann
Moderator
Konstrukteur
    
Beiträge: 11780
Registriert: 30.11.2006 CATIA V5R19
|
erstellt am: 19. Apr. 2013 14:02 <-- editieren / zitieren --> Unities abgeben: Nur für sexyphil
|
sexyphil
Mitglied
stud
Beiträge: 3
Registriert: 19.04.2013
|
erstellt am: 23. Apr. 2013 16:00 <-- editieren / zitieren --> Unities abgeben:
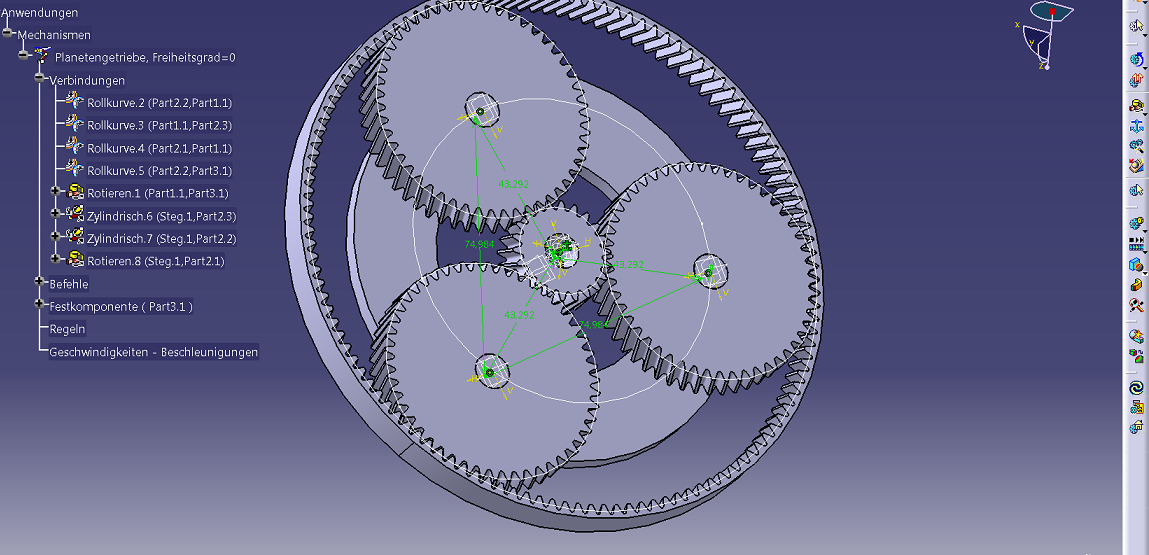
hallo, erstmal vielen dank für die hilfe. hab nach langem hin und her mir ein buch besorgt und damit das getriebe hinbekommen. allerdings wird in dem buch nicht erläutert wie man vorgeht, wenn die zähne sich überschneiden. simulieren kann ich alles nur überschneiden sich eben die zähne beim drehen. hat da vlt noch jemand n tipp?
danke! Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
thomasacro
Ehrenmitglied V.I.P. h.c.
Ingenieur Anwendungsberater

Beiträge: 3716
Registriert: 12.05.2004 V4
V5 2016 - 2020
V6 2016x -2019x
|
erstellt am: 23. Apr. 2013 16:23 <-- editieren / zitieren --> Unities abgeben: Nur für sexyphil
Hi Phil. DAS wirst du nur durch einen 100%ig(!) richtig konstruierten Rollkreis (Bei der Rollkurvenverbindung) oder durch ein auf x-Nachkommastellen genaues Übersetzungsverhältnis verhindern können. Denn grundsätzlich kannst du keine reale Verzahnung animieren. Wenn, würde es nur gerade mal nur über das Rollen eines Zahnes an einem anderen gehen. Aber genau das dauert ja nicht sooo lange ;-) ------------------
gruß, Tom  Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |
bgrittmann
Moderator
Konstrukteur
Beiträge: 11780
Registriert: 30.11.2006 CATIA V5R19
|
erstellt am: 23. Apr. 2013 17:32 <-- editieren / zitieren --> Unities abgeben: Nur für sexyphil
Servus Bitte Systeminfo ausfüllen. Das die Zähne sich überschneiden kann folgende Ursachen haben: - falsche Geometrie - falsche Anfangsausrichtung der Teile - falscher Rollkreisdurchmesser bzw Übersetzungsverhältnis - falsche Drehrichtung einer/mehrerer Verbindungen Gruß
Bernd ------------------
Warum einfach, wenn es auch kompliziert geht. Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP |

 Foren auf CAD.de (alle Foren)
Foren auf CAD.de (alle Foren)



 |
|