Hey,
habe euch mal in den Anhang ein Beispiel gehängt. Spiegelt ungefähr die Problematik wieder die ich gerade habe.
In der Beispieldatei findet ihr eine Doppelquerlenkeraufhängung.
In der Oberbaugruppe gibt es die Produkte Road, Chassis und Suspension.
Mein Ziel ist es eigentlich die Unterbaugruppe Suspension komplett mit kinematischen Befehlen zu vernetzen, ohne eine Festkomponente zu definieren und diese dann in der Oberbaugruppe noch weiter ans Chassis und die Straße anzubinden. Am Ende möchte ich das Chassis um die "Roll Axle" mit einem abhängigen Winkel drehen können und vertikal "hoch und runter" einfeder lassen können.
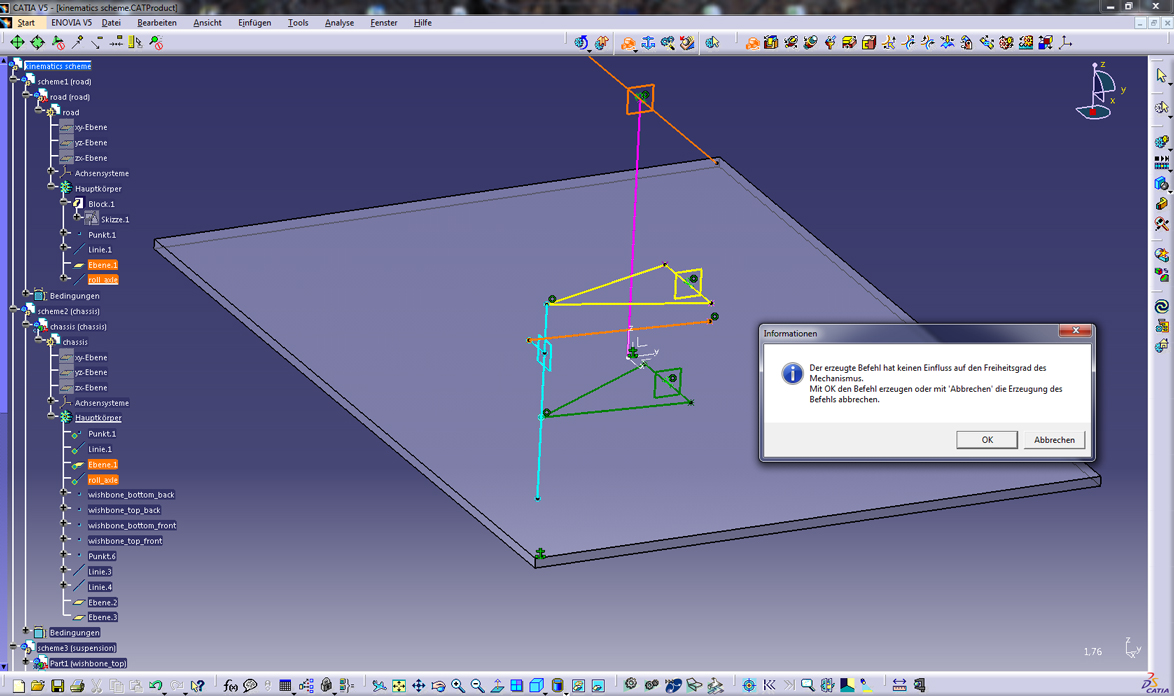
Die Kinematischen Verknüpfungen ohne Festkomponente innerhalb des Suspension Produkts sind erst einmal kein Problem. Wenn ich das Produkt dann in das Oberprodukt einfüge kann ich auch die Gelenkpunkte der Lenker an das Produkt Chassis verknüpfen. Alles so weit einwandfrei möglich. Wenn ich jetzt aber das Chassis mit Road verknüpfen möchte (Road ist Festkomponente) zum Beispiel um die Drehung um die Roll_axle zu realisieren meckert er wie im Bild gezeigt.
Woran kann das liegen? Habe schon versucht bevor ich die Verknüpfung mache, den Submechanismus aus dem Produkt Suspension in die Oberbaugruppe zu importieren (oder ist das Quatsch). Das hilft aber auch nicht und die Fehlermeldung kommt auch wieder.
Bin ich vielleicht von Grund auf falsch vorgegangen oder hängt es nur an einem kleinen Knopf ;-).
Bin gerade ein bisschen radlos...
Vielen Dank im Voraus für eure Hilfe.
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP

 Foren auf CAD.de (alle Foren)
Foren auf CAD.de (alle Foren)



 |
|