Hallo!
Ich möchte folgendes Problem lösen und habe mich zur Verdeutlichung auch an einer Grafik versucht (siehe Anhang):
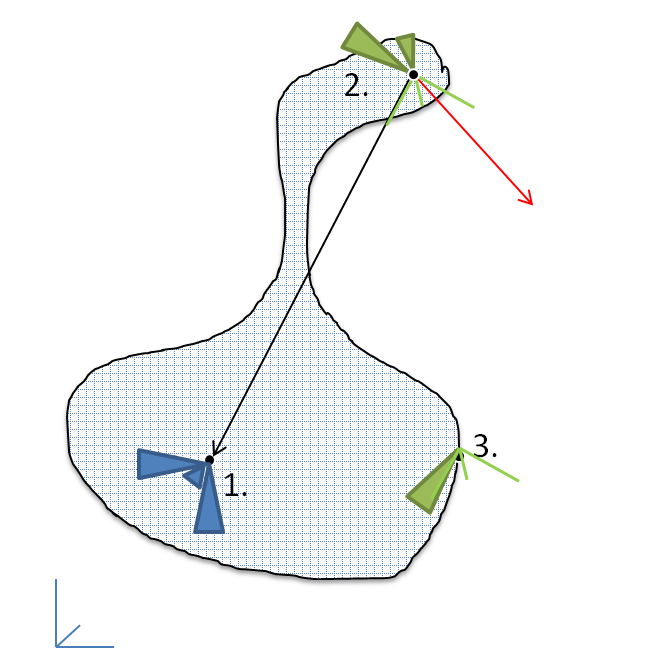
Ein deformierbarer Körper (3D) soll gelagert werden. Die RB entstammen einer Publikation und lauten:
- 1 Knoten ist vollst. constrained in seiner Bewegung
- 1 zweiter Knoten ist so gelagert, das er sich nur auf der initial definierten Achse zwischen eben diesem und dem eingespannten Knoten bewegen kann (1-2). Hier greift zudem eine Kraft an, mit beliebiger Richtung.
- für die vollst. Unterbindung von Starrkörperbewegungen wird der ungebundene Freiheitsgrad (Bewegung entlang der Achse) an einem dritten Punkt gesperrt.
Meine Ansatz war dafür
- 1 Punkt einzuspannen
- 1 Koordinatensystem zu definieren dessen eine Achse der beschriebenen entspricht.
- Das Knotenkoordinatensystem von Punkt zwei und drei entlang des neu definierten Koordinatensystems auszurichten
- in Punkt 2 die entsprechenden Freiheitsgrade sperren und
- in Punkt 3 dann den fehlenden.
Problem: Durch die Drehung der Knotenkoordinaten werden die (global) definierten Kraftkomponenten anders interpretiert und entlang der Knotenkoordinaten aufgebracht.
Ich möchte ungern eine Koordinatentransformation durchführen.
2. Ansatz um das zu umgehen:
- wie oben, bloß das in (2) ein Doppelknotenerzeugt wird. Der eine dient der Kraftaufbringung, der anderer der Aufbringung der RB inkl gedrehtem Knotenkoordinatensystem. Ich wollte "einfach" die Position beider Knoten koppeln und so die Transformation umgehen.
Problem: Auch die Kopplung erfolgt in Knotenkoordinaten und so führen die unterschdl. System hier zu einem außeinander driften.
Gibt es eine andere Möglichkeit der Kopplung oder einen gänzlich anderen Vorschlag?
Vielen Dank, bei Nachfragen zum Verständnis helfe ich gerne.
A. Polyp
Eine Antwort auf diesen Beitrag verfassen (mit Zitat/Zitat des Beitrags) IP

 Foren auf CAD.de (alle Foren)
Foren auf CAD.de (alle Foren)



 |
|